






2.77 Week 1
- Feb 11, 2017
- 3 min read
This week we kickstarted 2.77 FUNdaMENTALS of Precision Design, a MIT course taught by our lovely Professor Alex Slocum.
1. Practical Uploadable Problem Set (PUPS)
Our first PUPS for the semester is on design and free body diagrams. I chose to analyze a pair of long nose cutting pliers like the one you see here:

Note
My team completed our peer review after I created this blog post. I have updated the FRDPARRC table in PUPS #1. Please find the latest PUPS, White Paper, and Beam Bending Derivations here. Green comments are by Danny, pink comments by Ivy, and my updates are in red. I realize red is not very distinguishable from pink. I will probably use blue the next time. Additionally, if the resolution of the pictures are not good enough, I will upload the pictures directly into this blog the next time. Please refer to the pictures on this blog for now, because they have been sharpened and are clearer.
I created a preliminary FRDPARRC table to better understand the design of this particular machine:

A complete sketch of the pliers, and free body diagrams for each component:
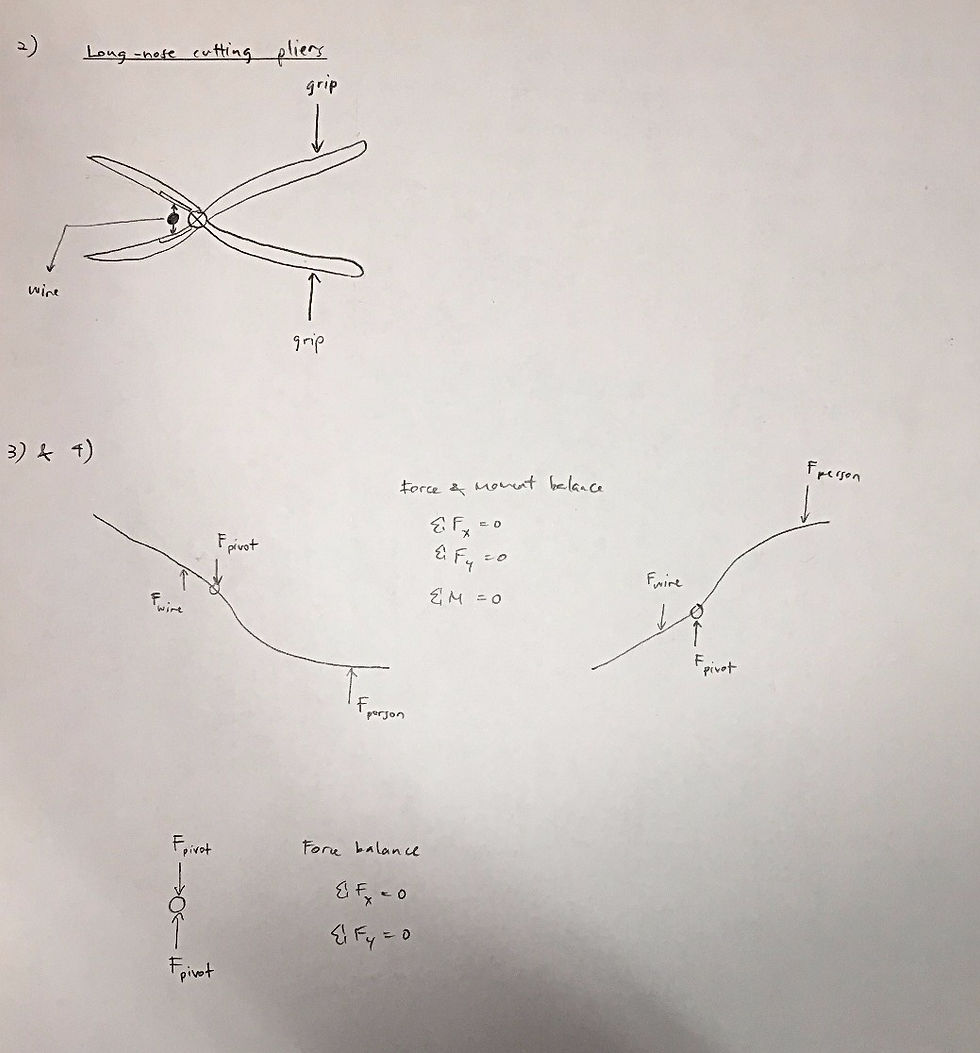
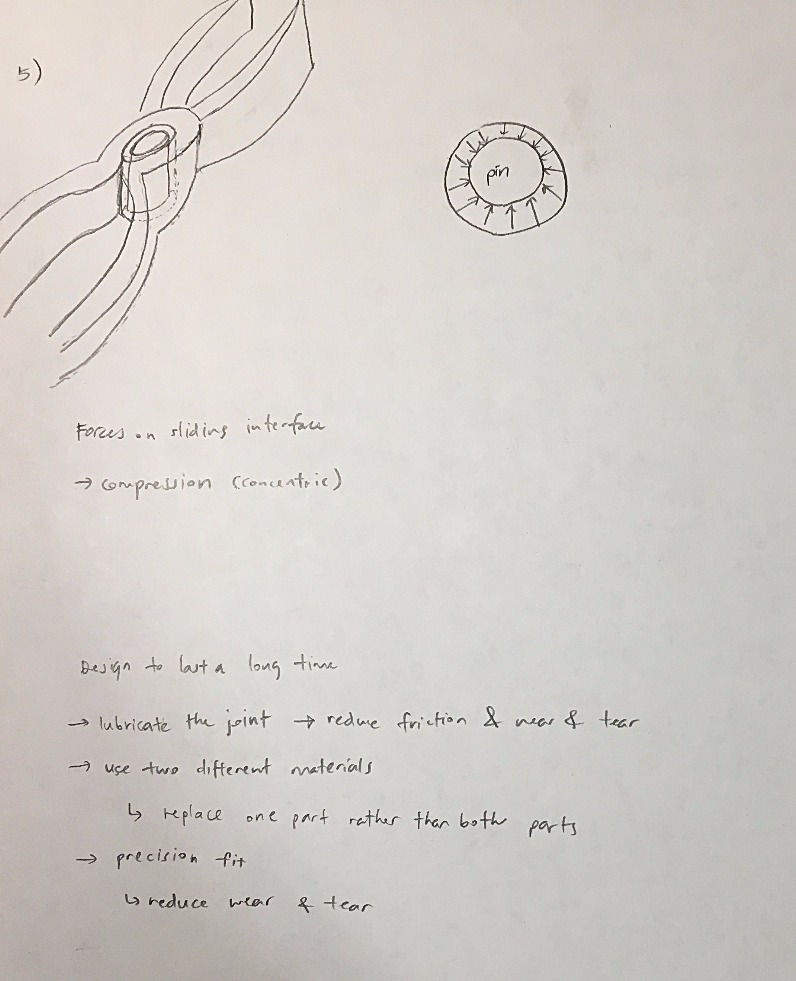
Design considerations for the sliding interface:
Sources of error:
2. White Paper
To prepare for our design project (i.e. to design, build and test a height adjustable table), I created a one-page white paper to convey my design goals:

3. Planar Exact Constraint (EC) system
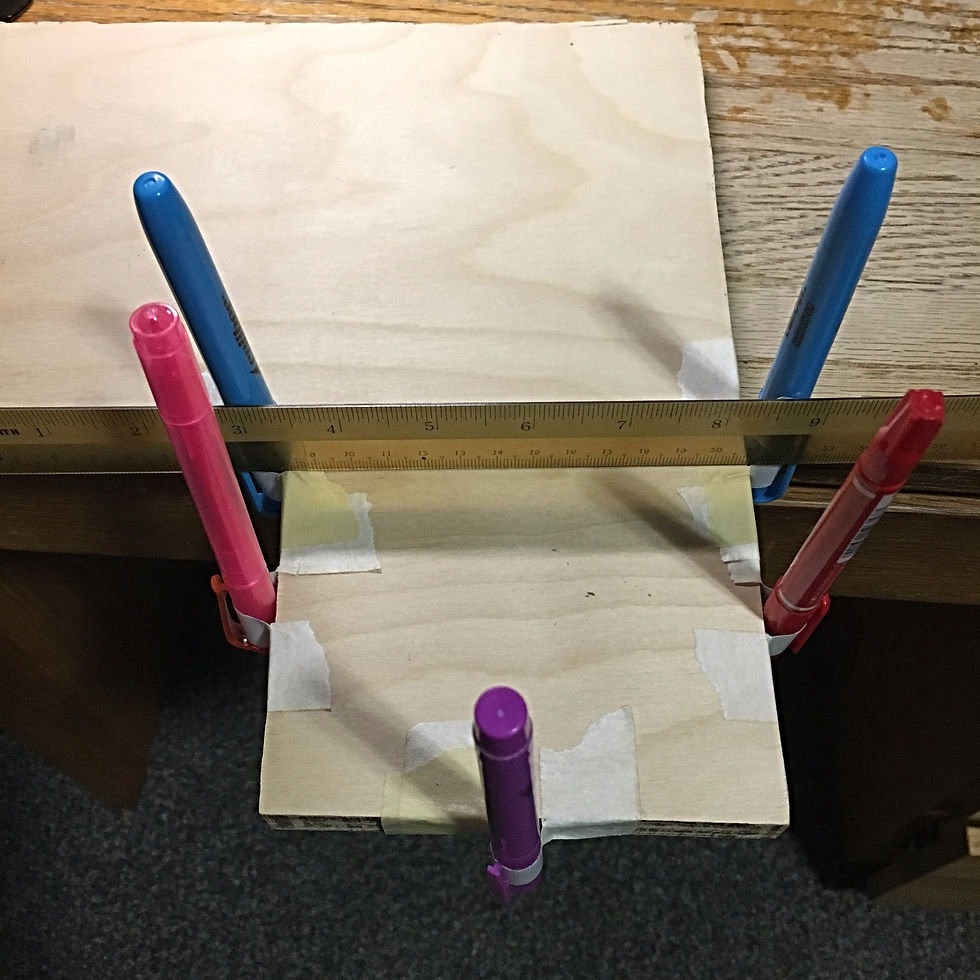
I created a simple Planar Exact Constraint (EC) system to explore the sensitivities in fixturing a planar object. It is made out of a piece of plywood and regular stationery, and are held together by tape.
According to Hale Layton in his PhD Thesis (1999), "the most important motivation for EC design in precision machines is to isolate sensitive parts or systems such as a metrology frame from influence of dimensionally changing supports and/or manufacturing tolerances." Or in more simpler terms, it is to "achieve some desired freedom of motion or perhaps no motion by applying the minimum number of constraints required."
For an unconstrained rigid object, there are 6 degrees of freedom: 3 rotational, 3 translational. To be exactly constrained in a plane, a system has to be constrained in 2 rotational directions, and 1 translational direction.
I chose to constrain a rigid palm-sized box. At any one time, the box is fixed in position by three points of contact, which can be removed easily to observe more interesting interactions. Please check out the video for live demo.
4. Geek and Seek
This week I decided to do geek about aerodynamics. I have this winter jacket that I really like, and it has this nice, large hood.

The phenomenon that I observed goes like this: Whenever I cycle, or when there is a strong wind in my face, I will the wind caressing my face. However, when I bring the hood of this jacket over my head, the wind immediately stops, and I stop feeling cold. It is as though I have an invisible shield over my face. But there is nothing physically in front of my face blocking the wind.
I recalled from Fluid Dynamics class that fluids travel in streamlines. Perhaps the streamlines cannot complete its path by going into the hood, so they will have to curve around the hood.

Additionally, I notice that the hood also creates a nice curved shape at the back of my head that allows the airflow to be less turbulent when leaving.
Still curious, I talked to an aeroastro friend of mine. He agrees with my on the concept of streamline, but also included an interesting hypothesis that the air inside my hood is at higher pressure than the air outside. This pressure differential prevents cold air from entering the hood, and causing me distress. Brrr!
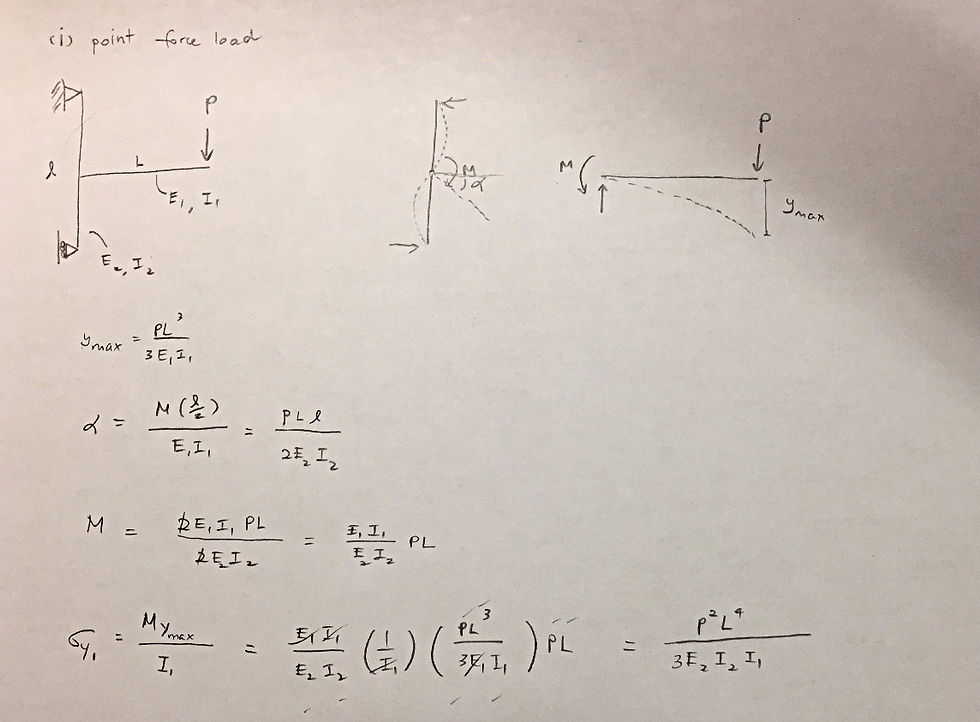
5. Beam Bending Derivations
Finally, we were tasked in class to analyze a horizontal beam that is fixed on one end, and free on the other. On the fixed side, the beam is attached to a vertical beam that is then attached via two points of contact to a wall. The analysis is done for both point force load and distributed load:

Comments